|
苏州光图智能科技有限公司 
| 联系人:曹纯 先生 (人事) |
 |
| 电 话:0512-62512433 |
|
手 机:18550656960  |
|
 |
|
 |
|
| 苏州光图智能供应光腚平整度缺陷检测系统 |
苏州光图智能科技有限公司专注于机器视觉检测,在三维激光扫描、三维高精度测量、三维360°轮廓扫描和无序抓取等视觉技术的研究和应用现处于行业领先水平。在铸造、橡胶、汽车、电子和木材等行业拥有着丰富的经验及实践案例。苏州光图智能作为瑞士photonfocus相机国内总代理,出售各个系列工业相机。光腚检测由公司根据客户需求自主研发完成检测:
一、需求描述
光腚由于其特殊的用途对于其表面的光滑度和缺陷也有着特殊的要求,光滑度低和缺陷较多的光腚往往不能够符合生产的质量要求,为了帮助用户消除这种问题的影响,我们采用3D缺陷检测来对生产加工过程进行监控。
1. 产品尺寸:高200 宽156
2. 尺寸测量:光锭长度、对角线、倒角尺寸
3. 平整度测量:光锭表面水平度
4. 缺陷检测:断面毛刺、线痕、崩边裂纹、划痕
5. 缺陷标准:两端4mm 中间7mm
二、解决原理――3D激光三角检测
3D扫描的原理是将线激光(Line Laser)与面阵相机(Camera)以一定角度照射产品表面。每个周期采集一条线的高度信息。线激光作为发射端,通过产品表面反射至相机,相机上光线位置经过一定的换算可以得到这条线上的高度信息。3D模块(线激光+相机)从头至尾的扫描完成对整个产品的3D呈现。扫描过程中,每帧数据的触发一般用编码器(Encoder)的输出信号(A/B shaft),得到当前的位置信息。因此,产品的长度测量精度是由编码器的精度决定的。
三、方案说明
1. 自主研发的软件平台
2. 采用瑞士进口3D相机,德国Z-Laser激光光源
3. 具有较强的抗扰能力(表面反光、外部光源干扰等)
4. 对图像进行拼接后再检测,极大提高检测效率,规避常规视觉系统效率低下问题
5. 通过相机拍摄扫描,再通过软件进行视觉检测
6. 检测器件的尺寸大小,缺陷,水平度等
7. 对测量的结果传输到电脑终端,并对数据进行处理
8. 把处理的结果通过modbus协议(或TCP/IP)与主控PLC通信
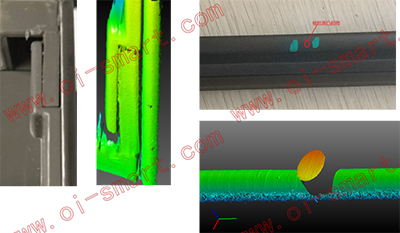
四、详细说明
利用3D激光三角测量技术采集到光腚的3D点云图,然后通过3D点云图中特殊的位置的信息进行放大以及测量,从而判断出此次光腚的表面特征。
经测试:
1)横向(y轴)分辨率可达0.08mm
2)纵向(z轴)分辨率可达0.06mm
3)可检测部分的划伤、裂纹 |
|
|